Use these Inter 1st Year Maths 1A Formulas PDF Chapter 6 Trigonometric Ratios up to Transformations to solve questions creatively.
Intermediate 1st Year Maths 1A Trigonometric Ratios up to Transformations Formulas
→ sin θ, cos θ, tan θ, cosec θ, sec θ and cot θ are called circular functions.
→ cosec θ, sec θ and cot θ are reciprocals to sin θ, cos θ and tan θ respectively.
→ sin2θ + cos2θ = 1; 1 + tan2θ = sec2θ; 1 + cot2θ = cosec2θ
→ sec θ + tan θ and sec θ – tan θ are mutual reciprocals.
Similarly cosec θ + cot θ and cosec θ – cot θ are also mutual reciprocals.
→ |sin θ| ≤ 1, |cosec θ| ≥ 1, |cos θ| ≤ 1 and |sec θ| ≥ 1
- sin 0° = o = cos 90°
- sin 15° = \(\frac{\sqrt{3}-1}{2 \sqrt{2}}\) = cos 75°
- sin 18° = \(\frac{\sqrt{5}-1}{4}\) = cos 72°
- sin 30° = \(\frac{1}{2}\) = cos 60°
- sin 36° = \(\frac{\sqrt{10-2 \sqrt{5}}}{4}\) = cos 54°
- sin 45° = \(\frac{1}{\sqrt{2}}\) = cos 45°
- sin 54° = \(\frac{\sqrt{5}+1}{4}\) = cos 36°
- sin 60° = \(\frac{\sqrt{3}}{2}\) = cos 30°
- sin 72° = \(\frac{\sqrt{10+2 \sqrt{5}}}{4}\) = cos 18°
- sin 75° = \(\frac{\sqrt{3}+1}{2 \sqrt{2}}\) = cos 15°
- sin 90° = 1 = cos 0°
![]()
Also, tan 15° = 2 – √3, tan 75° = 1 + √3
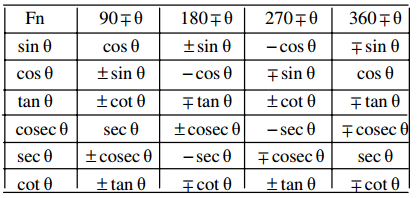
Sign to the determined by “ALL SILVER CUPS” rules
- sin (90° – θ) = cos θ; sin (90° + θ) = cos θ
- cos (90° – θ) – sin θ; cos (90° + θ) = -sin θ
- sin (180° – θ) = sin θ; sin (1800 + θ)= -sin θ
- cos (180° – θ) = -cos θ; cos (180° + θ) = -cos θ
- sin (270° – θ) = -cos θ; sin (270° + θ) = -cos θ
- cos (270° – θ) = -sin θ; cos (270° + θ) = sin θ
sin (360° – θ) = -sin θ; sin (360° + θ) = sin θ - cos (360° – θ) = cos θ; cos (360° + θ) = cos θ When ‘n’ is a +ve integer,
- sin (n. 360° – θ) = -sin θ; sin (n. 360° + θ) = +sin θ
- cos (n. 360° – θ) = cos θ; cos (n. 360° + θ) = cos θ
- sin (-θ) = – sin θ, cos (-θ) = cos 0; tan (-θ) = -tan θ.
→ For 0°, 180°, 360° ……………….. (multplies of π), there is no change in the ratios.
→ For 90°, 270°, 450°…………. (odd multiplies of \(\frac{\pi}{2}\) we get change in the ratio.
- For sin we get cos
- For tan we get cot
- For sec we get cosec
- For cos we get sin
- For cot we get tan
- For cot we get sin
→ Any non-constant function f : R → R is said to be “Periodic”, if there exists a real number p(≠ 0) such that f(x + p) = f(x) for each x ∈ R. The least positive value of ‘p’ with this property is called the “Period” of ‘f’.
→ If ‘f’ is a periodic function with period ‘P’ then
- – f is also a periodic function with period ‘P.
- f(x – p) = f(x), f(x + pn) = f(x) ∀ n ∈ Z, x ∈ R.
→ If f(x) is a periodic function with period ‘P, then f(ax + b) is also a periodic function with period \(\frac{P}{|a|}\)
→ If y = f(x), y = g(x) are periodic functions with l, m as the periods respectively, then a, b ∈ R the function h(x) = af(x) + bg(x) is a period function and L.C.M. of {l, m}
(if exist) is a period of h.
→ \(\frac{2 \pi}{k}\) is the period of sin x, cosec x, cos x and sec x.
→ \(\frac{\pi}{k}\) is the period of tan x and cot x.
![]()
→ Range of a sin x + b cos x is \(\left[-\sqrt{a^{2}+b^{2}}, \sqrt{a^{2}+b^{2}}\right]\)
→ Range of a sin x + b cos x + c is [c – \(\sqrt{a^{2}+b^{2}}\), c + \(\sqrt{a^{2}+b^{2}}\)]
→ sin x and cos x are continuous on ‘R’
→ tan x is. discontinuous at x = (2n + 1).\(\frac{\pi}{2}\),n ∈ Z.
→ cot x is discontinuous at x = nπ, n ∈ Z.
→ sec x is discontinuous at x = (2n + 1).\(\frac{\pi}{2}\), n ∈ Z.
→ cosecx is discontinuous at x = nπ, n ∈ Z.
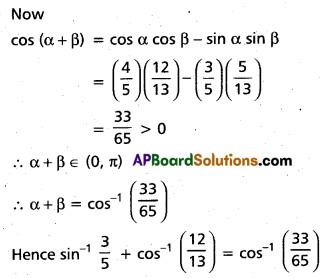
→ sin (A ± B) = sin A cos B ± cos A sin B
→ cos (A ± B) = cos A cos B + sin A sin B
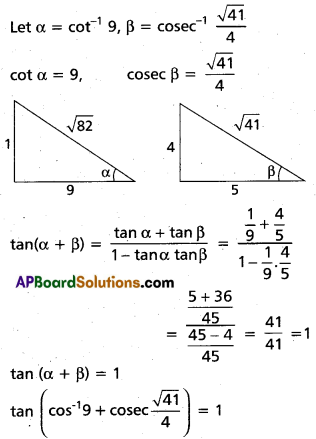
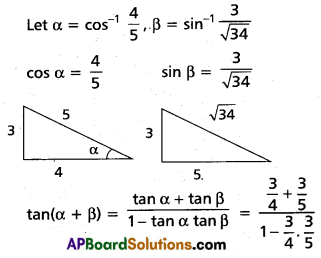
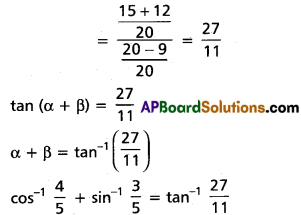
→ tan (A ± B) = \(\frac{\tan A \pm \tan B}{1 \mp \tan A \tan B}\)
→ cot (A ± B) = \(\frac{\cot A \cot B \mp 1}{\cot B \pm \cot A}\)
→ sin (A + B). sin (A-B) = sin2A – sin2B = cos2B – cos2A
→ cos (A + B). cos (A – B) = cos2A – sin2B = cos2B – sin2A
→ sin (A + B + C) = sin A cos B cos C + cos A sin B cos C + cos A cos B sin C – sin A sin B sin C
→ cos (A + B + C) = cos A cos B cos C – cos A sin B sin C – sin A cos B sin C – sin A sin B cos C
→ tan (A + B + C) = \(\frac{\sum \tan A-\pi \tan A}{1-\sum \tan A \tan B}\)
→ sin 2A = 2 sin A cos A, sin A = 2 sin \(\frac{A}{2}\) cos \(\frac{A}{2}\)
→ cos 2A = cos2A – sin2A = 1 – 2 sin2 A = 2 cos2A – 1
![]()
→ cos A = cos2\(\frac{A}{2}\) sin2\(\frac{A}{2}\) = 1 – 2 sin2\(\frac{A}{2}\) = 2 cos2 \(\frac{A}{2}\) – 1
→ tan 2A = \(\frac{2 \tan A}{1-\tan ^{2} A}\), tan A = \(\frac{2 \tan \frac{A}{2}}{1-\tan ^{2} \frac{A}{2}}\)(\(\frac{A}{2}\), A are not odd multiples of \(\frac{\pi}{2}\))
→ cot 2A = \(\frac{\cot ^{2} A-1}{2 \cot A}\), cot A = \(\frac{\cot ^{2} \frac{A}{2}-1}{2 \cot \frac{A}{2}}\); (A is not an integral multiple of π)
→ sin 2A = \(\frac{2 \tan A}{1+\tan ^{2} A}\), sin A = \(\frac{2 \tan \frac{A}{2}}{1+\tan ^{2} \frac{A}{2}}\); (\(\frac{A}{2}\), is not an odd multiple of \(\frac{\pi}{2}\))
→ cos 2A = \(\frac{1-\tan ^{2} A}{1+\tan ^{2} A}\), cos A = \(\frac{1-\tan ^{2} \frac{A}{2}}{1+\tan ^{2} \frac{A}{2}}\)
→ sin 3A = 3sin A – 4 sin3A
→ cos 3A = 4cos3A – 3 cos A
→ tan 3A = \(\frac{3 \tan A-\tan ^{3} A}{1-3 \tan ^{2} A}\)
→ cot 3A = \(\frac{3 \cot A-\cot ^{3} A}{1-3 \cot ^{2} A}\)
→ sin(A + B) + sin (A – B) = 2sin A cos B
→ sin(A + B) – sin(A – B) = 2cos A sin B
→ cos (A + B) + cos (A – B) = 2cos A cos B
→ cos(A + B) – cos(A – B) = -2sin A sin B
→ sin C + sin D = 2sin \(\frac{C+D}{2}\) cos \(\frac{C-D}{2}\)
→ sin C – sin D = 2cos \(\frac{C+D}{2}\) sin \(\frac{C-D}{2}\)
![]()
→ cos C + cos D = 2 cos \(\frac{C+D}{2}\) cos \(\frac{C-D}{2}\)
→ cos C – cos D = -2 sin \(\frac{C+D}{2}\) sin \(\frac{C-D}{2}\)
→ For any A ∈ R
(a) sin A = ±\(\sqrt{\frac{1-\cos 2 A}{2}}\)
(b) cos A = ±\(\sqrt{\frac{1+\cos 2 A}{2}}\)
(c) IfA ¡s not an odd multiple of \(\frac{\pi}{2}\), then tan A = ±\(\sqrt{\frac{1-\cos 2 A}{1+\cos 2 A}}\)
→ sin \(\frac{A}{2}=\pm \sqrt{\frac{1-\cos A}{2}}\)
→ cos \(\frac{A}{2}=\pm \sqrt{\frac{1+\cos A}{2}}\)
→ If A is not an odd multiple of n, then tan \(\frac{A}{2}=\pm \sqrt{\frac{1-\cos A}{1+\cos A}}\)
→ If a ray \(\overrightarrow{\mathrm{OP}}\) makes an angle θ with the positive direction of X-axis then
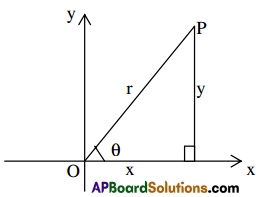
- Sin θ = \(\frac{\mathrm{y}}{\mathrm{r}}\)
- cos θ = \(\frac{\mathrm{x}}{\mathrm{r}}\)
- tan θ = \(\frac{\mathrm{y}}{\mathrm{x}}\) (x ≠ 0)
- cot θ = \(\frac{\mathrm{x}}{\mathrm{y}}\) (y ≠ 0)
- sec θ = \(\frac{\mathrm{r}}{\mathrm{x}}\)(x ≠ 0)
- cosec θ = \(\frac{\mathrm{r}}{\mathrm{y}}\)(y ≠ 0)
Relations :
- sin θ cosec θ = 1
- cos θ sec θ = 1
- tan θ cot θ = 1
- sin2 θ + cos2 θ = 1
- 1 + tan2θ = sec2 θ → (sec θ + tan θ)(sec θ – tan θ) = 1
→ sec θ + tan θ = \(\frac{1}{\sec \theta-\tan \theta}\) = 1 - 1 + cot2θ = cosec2θ → (cosec θ + cot θ) (cosec θ – cot θ) = 1
- sec2θ + cosec2θ = sec2θ. cosec2θ
- tan2θ – sin2θ = tan2θ . sin2θ;
cot2θ – cos2θ = cot2θ. cos2θ - sin2θ + cos4θ = 1 – sin2θ cos2θ
= sin4θ + cos2θ - sin4θ + cos4θ = 1 – 2sin2θ cos2θ
- sin6θ + cos6 θ = 1 – 3sin2θ cos2θ
- sin2x + cosec2x ≥ 2
- cos2x + sec2 x ≥ 2
- tan2 x + cot2 x ≥ 2.
![]()
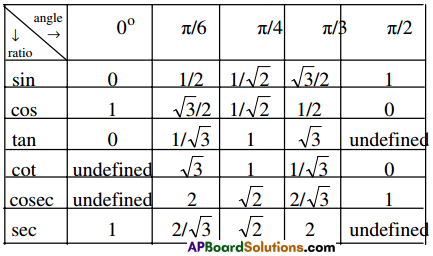
Values of trigonometric ratios of certain angles
Signs of Trigonometric ratios :
If lies in I, II, III, IV quadrants then the signs of trigonometric ratios are as follows.
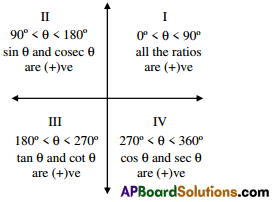
Note :
- 0°, 90°, 180°, 270°. 360°, 450°, etc. are called quadrant angles.
- With “ALL SILVER TEA CUPS” symbol we can remember the signs of trigonometric ratios.
Coterminal angles :
If two angles differ by an integral multiples of 360o then two angles are called coterminal angles.
Thus 30°, 390°, 750°, 330° etc., are coterminal angles.
Complementary Angles :
Two Angles A, B are said to complementary ⇒ A + B = 90°
Supplementary angles :
Two angles A, B are said to be supplementary ⇒ A + B = 180°.
→ sin C + sin D = 2sin\(\frac{\mathrm{C}+\mathrm{D}}{2}\). cos \(\frac{\mathrm{C}-\mathrm{D}}{2}\)
→ sin C – sin D = 2cos\( . sin [latex]\frac{\mathrm{C}-\mathrm{D}}{2}\)
→ cos C + cos D = 2cos \(\frac{\mathrm{C}+\mathrm{D}}{2}\). cos \(\frac{\mathrm{C}-\mathrm{D}}{2}\)
→ cos C – cos D = 2sin\(\frac{\mathrm{C}+\mathrm{D}}{2}\). sin \(\frac{\mathrm{D}-\mathrm{C}}{2}\)
→ 2sin A cos B = sin(A + B) + sin(A – B)
→ 2cos A sin B = sin(A + B) – sin(A – B)
→ 2cos A cos B = cos(A + B) + cos(A – B)
![]()
→ 2sin A sin B = cos(A – B) – cos(A + B)
(or)
cos(A – B) – cos(A + B) = 2 sin A sin B.
→ \(\frac{\sin A+\sin B}{\sin A-\sin B}\) = tan\(\left(\frac{A+B}{2}\right)\).
→ If sin A + sin B = x, and cos A + cos B = y. Then
- tan\(\left(\frac{\mathrm{A}+\mathrm{B}}{2}\right)=\frac{\mathrm{x}}{\mathrm{y}}\)
- sin(A + B) = \(\frac{2 x y}{y^{2}+x^{2}}\)
- cos (A + B) = \(\frac{y^{2}-x^{2}}{y^{2}+x^{2}}\)
- tan(A + B) = \(\frac{2 x y}{y^{2}-x^{2}}\)