Use these Inter 1st Year Maths 1B Formulas PDF Chapter 2 Transformation of Axes to solve questions creatively.
Intermediate 1st Year Maths 1B Transformation of Axes Formulas
→ x = x’ + h ⇒ x’ = x – h
→ y = y’ + k ⇒ y’ = y – k
→ To make the first degree term absent, origin should be shifted to \(\left(\frac{h f-b g}{a b-h^{2}}, \frac{g h-a f}{a b-h^{2}}\right)\)
→ If the equation is ax2 + by2 + 2gx + 2fy + c = 0, origin should be shifted to be \(\left(-\frac{g}{a},-\frac{f}{b}\right)\)
| x’ | y’ | |
| x | cos θ | – sin θ |
| y | sin θ | cos θ |
x = x’ cos θ – y’ sin θ
x’ = x cos θ + y sin θ
y = x’ sin θ + y’ cos θ
y’ = – x sin θ + y cos θ
→ To make the xy term absent, axes should be rotated through an angle θ given by
tan 2θ = \(\frac{2 h}{a-b}\)
![]()
Rotation Of Axes (Change Of Direction):
I. Definition: If thc axes are rotated through an angle in the same plane by keeping the origin constant, then the transformation is called Rotation of axes.
2. Theorem: To find the co-ordinates of a point (x,y)are transformed to (X, Y)when the axes are rotated through an angle ‘6’ about the origin in the same plane.
Proof: Let x’Ox, yOY’ are the original axes
Let P(x,y)be the co-ordinates of the point in the above axes.
After rotating the axes through an angle ‘θ’, then the co-ordinates of P be (X, Y) w.r.t the new axes X’OX and YOY’ as in figure.
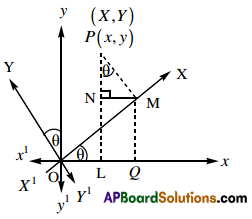
Since θ is the angle of rotation, then ∠xOA = ∠yOY = θ as in the figure.
Since L, M is projections of P on Ox and OX respectively. We can see that ∠LPM = ∠xOA = θ
Let N be the projection to PL from M
Now x = OL = OQ – LQ = OQ – NM
= OM cos θ – PM sin θ
= A cos θ – Y sin θ
y = PL = PN + NL = PN + MQ
PM cos θ + OM sin θ = Ycos θ + X sin θ
x = X cos θ – Y sin θ and
y = Y cos θ + X sin θ ………….(1)
Solving the above equations to get X and Y, then X = x cos θ + y sin θ and Y = -x sin θ + y cos θ ………… (2)
From (1) and (2) we can tabulate
| x’ | y’ | |
| x | cos θ | – sin θ |
| y | sin θ | cos θ |
Note:
- If the axes are turned through an angle ‘ θ ’, then the equation of a curve f (x, y) = 0 is transformed to f (X cos θ – Y sin θ, X sin θ + Y cos θ) = 0
- If f (X, Y) = 0is the transformed equation of a curve when the axes are rotated through an angle ‘ θ ’ then the original equation of the curve is f (x cos θ + y sin θ, – x sin θ + y cos θ) = 0
Theorem:
To find the angle of rotation of the axes to eliminate xy term in the equation ax2 + 2hxy + by2 + 2 gx + 2 fy + c = 0
Proof: given equation is ax2+ 2hxy + by2 + 2 gx + 2 fy + c = 0
Since the axes are rotated through an angle θ, then x = X cos θ – Y sin θ, y = X sin θ + Y cos θ
Now the transformed equation is
a (X cos θ – Y sinθ)2 + 2h (X cos θ – Y sin θ)(X sin θ + Y cos θ) + b (X sin θ + Y cos θ)2 + 2g (X cos θ – Y sin θ) + 2 f (X sin θ + Y cos θ) + c = 0
⇒ X2cos2θ + Y2sin2θ – 2XYcosθsinθ) + 2h [X2cos θ + XY(cos2θ – sin2θ) – Y sin2θ cos2θ] + b[X2 sin2θ + Y2 cos2θ + 2XY cos θ sin θ) + 2g (X cos θ – Y sin θ) + 2 f (X sin θ + Y cos θ) + c = 0
Since XY term is to be eliminated, coefficient of XY = 0.
⇒ 2 (b – a) cos θ sin θ + 2h (cos2 θ – sin2 θ) = 0
⇒ h cos 2θ + (b – a) sin 2θ = 0
⇒ 2hcos2θ = (a -b)sin 2θ
⇒ Angle of rotation (θ) = \(\frac{1}{2}\) Tan-1\(\left(\frac{2 h}{a-b}\right)\)
Note: The angle of rotation of the axes to eliminate xy term in
ax2 + 2hxy + ay2 + 2 gx + 2 fy + c = 0 is \(\frac{\pi}{4}\)
Translation of Axes:
1. Definition: Without changing the direction of the axes, the transformation in which the origin is shifted to another position or point is called translation of axes.
2. Theorem: To find the co-ordinates of a point (x, y) are translated by shifting the origin to a point (x, y)
Proof :
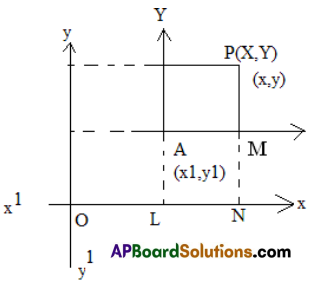
Let xox1 xox1, yoy1 be the original axes and A(x1, y1) be a point to which the origin is shifted
Let AX, AY be the new axes which are parallel to the original axes as in figure.
Let P be any point in the plane whose coordinates w.r.t old system are (x, y)
And w.r.t new axes are (X, Y) .
From figure, A = (x1, y1) then AL = y1, OL = x1,
P(x, y )then x = ON = OL + LN = OL + AM = x1 + X = X + x1
Hence x = X + x1.
y = PN = PM +MN = X+ AL = X + y1
therefore, y = Y + y1
hence x = X + x1 y = Y + y1
3. Theorem: To find the point to which the origin is to be shifted by translation of axes to eliminate x, y terms(first degree terms) in the equation ax2 + 2xhy + by2 + 2gx + 2fy + c = 0 (2 = ab)
Proof : given equation is ax2 + 2 xhy + by2 + 2gx + 2fy + c = 0
Let (x1, y1) be a point to which the origin is shifted by translation Let (X ,Y) be the new co-ordinates of the point (x, y) .
the equations of the transformation are x = X + x1, y = Y + y1
Now the transformed equation is
a (X + x1)2 + 2h (X + x1)(Y + y1)+ b (Y + y1)2 + 2g (X + x1) + 2f [Y + y1] + c = 0
⇒ a(X2 + 2x1X + x12) + 2h(XY + x1Y + y1X + x1y1) + b(Y2 + 2y1Y + y12) + 2g(X + x1) + 2f (Y + y1) + c = 0
⇒ aX2 + 2hXY + bY2 + 2X [ax1 + hy1 + g) + 2Y(hx1 + by1 + f ) + (ax12 + 2x1 + by12 + 2gx1 + 2fy1 + c) = 0
Since x, y terms (the first degree terms) are to be eliminated
ax1 + hy1 + g = 0
hx1 + by1 + f = 0
Solving these two equations by the method of cross pollination
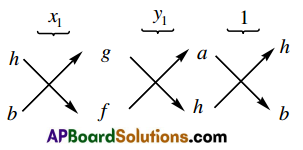
\(\frac{x_{1}}{h f-b g}=\frac{y_{1}}{g h-a f}=\frac{1}{a b-h^{2}}\) ⇒ x1 = \(\frac{h f-b g}{a b-h^{2}}\) y1 = \(\frac{g h-a f}{a b-h^{2}}\)
New Origin is ⇒ (x1, y1) = \(\left(\frac{h f-b g}{a b-h^{2}}, \frac{g h-a f}{a b-h^{2}}\right)\)
![]()
Note:
(i) The point to which the origin has to be shifted to eliminate x, y terms by translation in the equation ax2 + by2 + 2gx + 2 fy + c = 0is \(\left(\frac{-g}{a}, \frac{-f}{b}\right)\)
If b = a, then the new origin is \(\left(\frac{-g}{a}, \frac{-f}{b}\right)\)
(ii) The point to which the origin has to be shifted to eliminate x, y terms by translation of axes in the equation a(x + x1)2 + b(y + y1)2 = c is (-x1, – y1)
(iii) The point to which the origin has to be shifted to eliminate x, y terms by translation in the equation 2hxy + 2gx + 2 fy + c = 0 is \(\left(\frac{-f}{h}, \frac{-g}{h}\right)\)
l h ’ h I
Theorem : To find the condition that the equation ax2 + 2hxy + by2 + 2 gx + 2 fy + c = 0 to be in the form aX2 + 2hXY + bY2 = 0 when the axes are translated. (h2 ≠ ab)
Proof : From theorem 3, we get
ax1 + hy1 + g = 0 ………..(1)
hx1 + by1 + f = 0 …………(2)
Solving (1) and (2),
(x1, y1) = \(\left(\frac{h f-b g}{a b-h^{2}}, \frac{g f-a f}{a b-h^{2}}\right)\)
Since the equation is to be in the form of aX2 + 2hXY + bY2 = 0 ,then for this we should have axj2 + 2hx1y1 + by2 + 2 gx1 + 2 fy1 + c = 0
⇒ (ax1 + hyx + g) x1 + (x1 + byx + f) yx + (gx + fy1 + c ) = 0
⇒ (0).x + (0), y + (gx1 + fyx + c) = 0 from(1) and (2) ⇒ gx1 + fyx + c = 0 …………..(3)
Substituting x1, y1 in (3), we get
g\(\left(\frac{h f-b g}{a b-h^{2}}\right)\) + f\(\left(\frac{g h-a f}{a b-h^{2}}\right)\) + c = 0
⇒ fgh – bg2 + fgh – af2 + abc + -ch2 = 0
⇒ abc + 2 fgh – af2 – bg2 – ch2 = 0